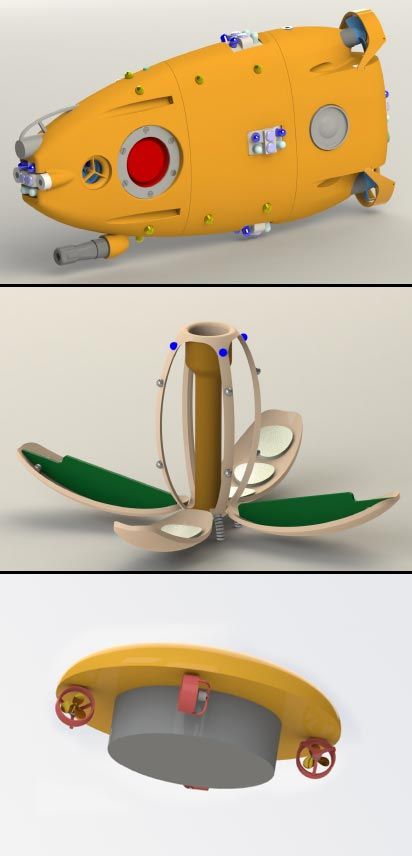
aFish, aMussels und aPads sollen künftig gemeinsam die Lagune von Venedig erforschen.
Graz/Venedig – Die Wasserwelt in und rund um Venedig wird stark von Industrie, Tourismus, Verkehr und ihren Bewohnern geprägt. Das Monitoring der empfindlichen Unterwassergebiete der Lagune in Bezug auf Verschmutzung oder die Auswirkungen des Klimawandels ist dementsprechend schwierig. Eine europäische Forschergruppe unter Leitung des Grazer Zoologen Thomas Schmickl entwickelt für diese Aufgabe einen autonomen Roboterschwarm.
Ziel der Wissenschafter aus Österreich, Deutschland, Kroatien, Frankreich, Belgien und Italien ist es, ein möglichst engmaschiges, bewegliches und schnell wandelbares Monitoring-Netzwerk über den aquatischen Lebensraum von Venedig zu spannen. Die Forscher greifen im neuen EU-Projekt "subCULTron" auf sich selbst organisierende, autonom kommunizierende Robotertypen zurück. Rund 120 Unterwasser-Schwarmroboter sollen letztlich eingesetzt werden, schilderte Thomas Schmickl, der Leiter des Artificial Life Lab an der Universität Graz. Das Projekt verfügt über ein Forschungsbudget von vier Millionen Euro und ist auf vier Jahre angelegt.
Drei unterschiedliche Robotertypen
Konkret sollen drei eigens entwickelte unterschiedliche Robotertypen zum Einsatz kommen. Künstliche Muscheln (aMussels – artificial mussels), die sich am Lagunenboden festsetzen und dort über längere Zeiträume Daten über Wasser- und Bodenbeschaffenheit sammeln. Nötigenfalls sollen sie aber auch gemeinsam im Schwarm unter Nutzung der Strömung den Standort wechseln können, erklärte Schmickl.
Die schnellen und beweglichen "aFish"-Roboter übernehmen die Rolle des Vermittlers zwischen den aMussels und den an der Wasseroberfläche wie Seerosen schwimmenden "aPads". Diese sind die Basisstationen für den Datenaustausch zu den Wissenschaftern im Labor und dienen auch als Energieladestationen für die "aFish"-Roboter. Sie gewinnen ihre Energie aus Solarzellen. Damit die Roboter möglichst energiesparend und lange agieren können, werden neue Methoden der Energiegewinnung im Unterwasserbereich entwickelt.
Schwarmintelligenz
Der Roboterschwarm kommuniziert laut Schmickl über bioinspirierte Algorithmen, die aus dem Schwarmverhalten von sozialen Insekten und Fischen abgeleitet wurden. Diese Algorithmen ermöglichen es, dass jeder einzelne Roboter über seinen Zustand (Aufenthaltsort, Energiestatus) Bescheid weiß, aber auch so etwas wie eine "Schwarmintelligenz" besitzt. Durch die große Zahl an Robotern sollen größere Mengen an Umweltdaten von verschiedenen Plätzen der Lagune und den Kanälen von Venedig gesammelt werden.
Die Forscher erhoffen sich Erkenntnisse über die Auswirkungen menschlicher Interventionen auf die Lagune zu erfassen und weitere Schäden früh genug abwenden zu können. Vorteile seien auch für Industrie und Technik zu erwarten, da hier ein System aufgebaut werde, das über völlig neuartige Technologie verfügt, die später im industriellen Bereich übernommen werden könnte, so Schmickl. Die ersten subCULTron-Prototypen werden von 15. bis 16. Oktober auf der EXPO 2015 (am Standort Venedig) präsentiert. (APA/red, 9.10.2015)